A list of software libraries I actively develop or have previously contributed to -

Autonomy Research Testbed
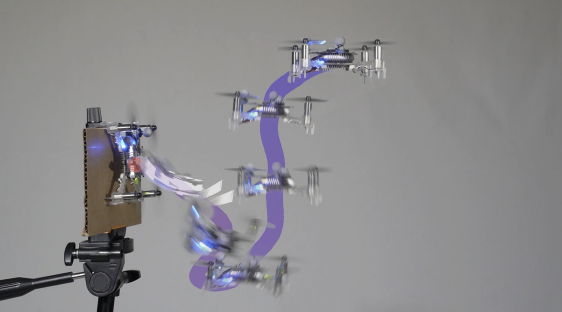
A comprehensive software and hardware platform for developing and testing robot autonomy algorithms in both simulation and reality. Bridges the sim-to-real gap for autonomous systems.