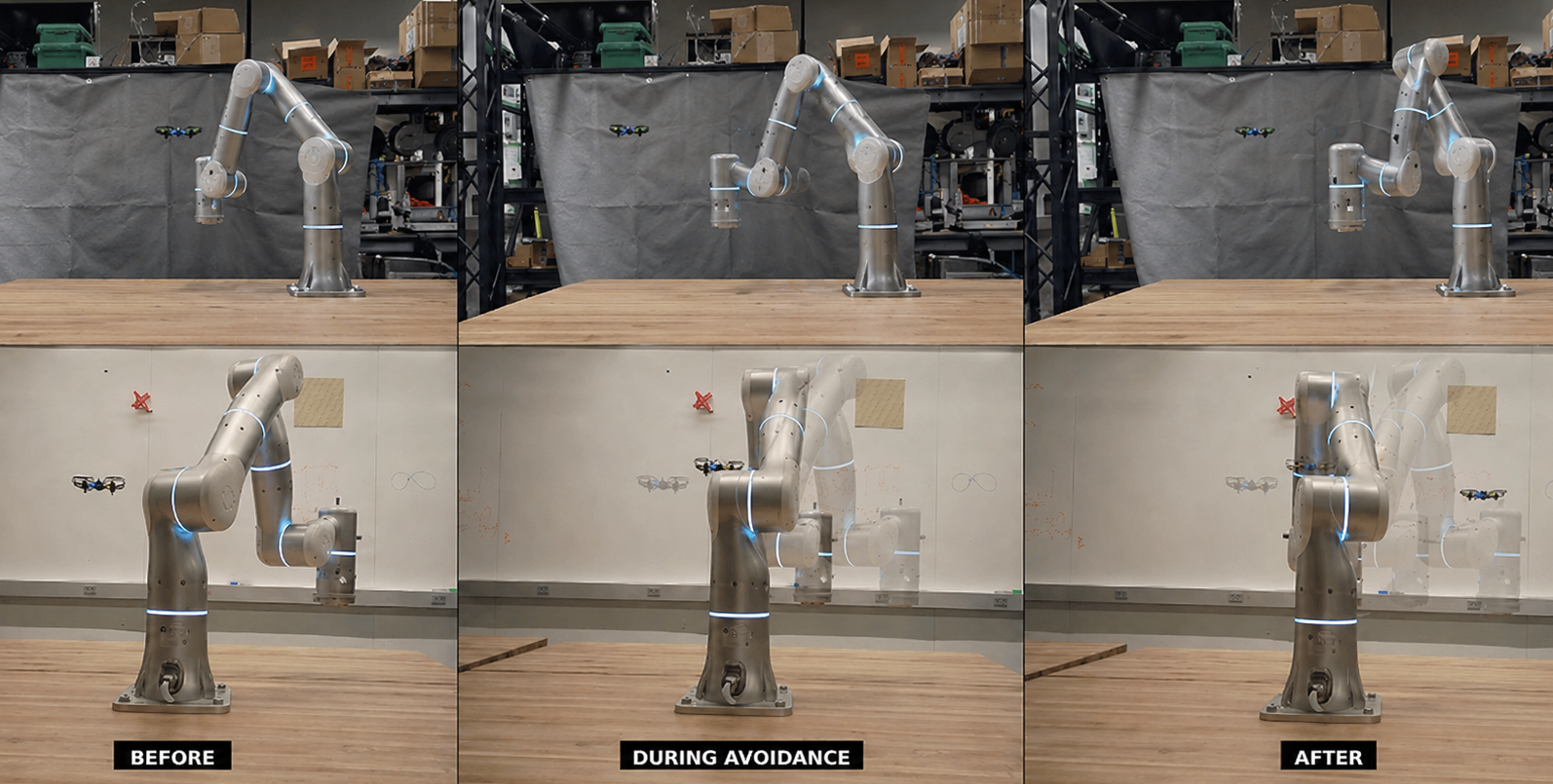
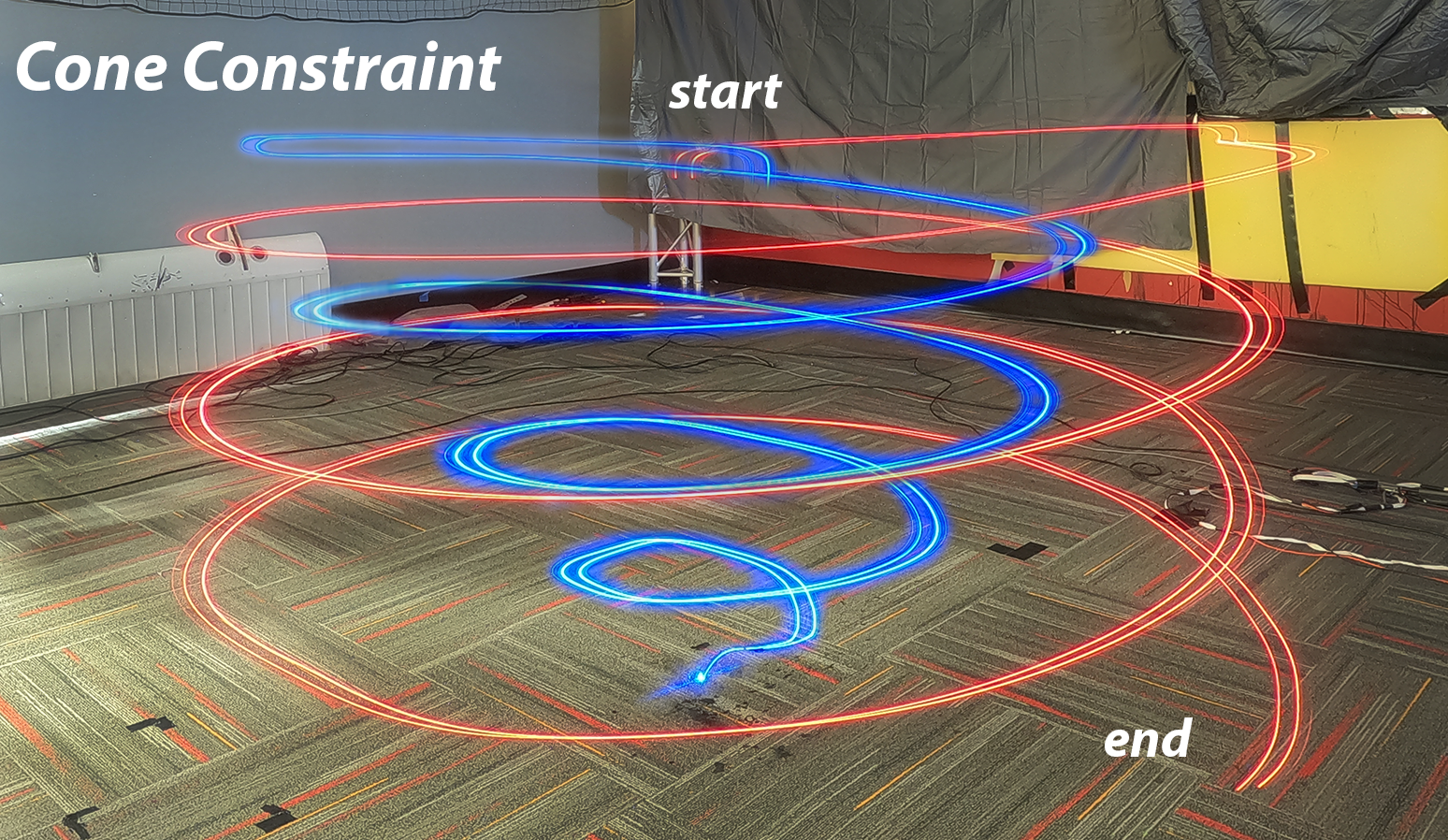
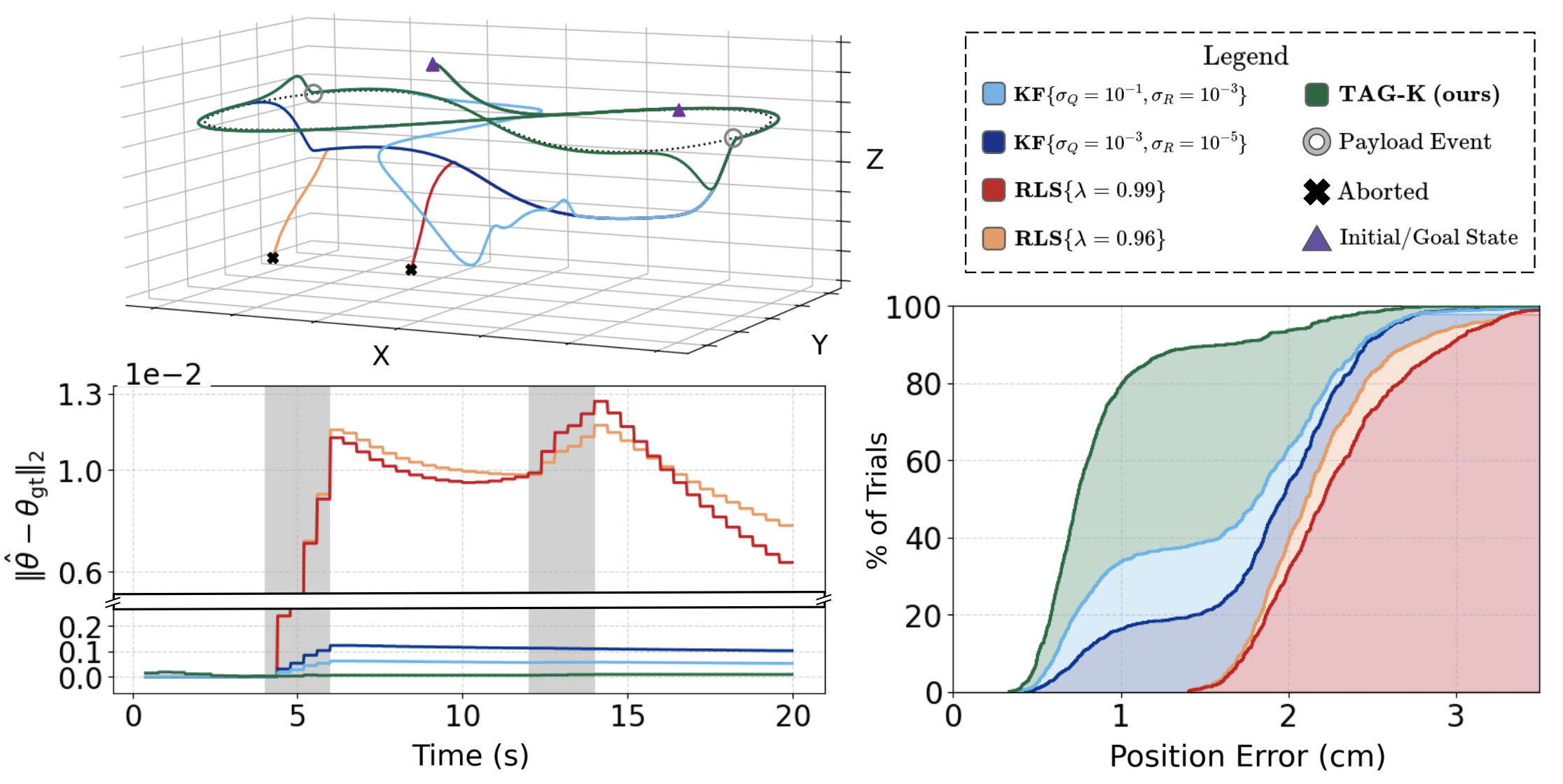
TinySDP: Real Time Semidefinite Optimization for Certifiable and Agile Edge Robotics
Robotics: Science and Systems (RSS) , 2026 | Sydney, Australia

Incoming Ph.D. student at Carnegie Mellon University
Previously:
MS in Computer Science, Columbia University under Brian Plancher and James Anderson
BS in Computer Science and Data Science, UW-Madison under Dan Negrut
Robotics: Science and Systems (RSS) , 2026 | Sydney, Australia
IEEE International Conference on Robotics and Automation (ICRA) , 2026 | Vienna, Austria
IEEE International Conference on Robotics and Automation (ICRA) , 2026 | Vienna, Austria

IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2025 | Hangzhou, China
Journal of Open Source Software , 2024
arXiv preprint arXiv:2403.11000
ECCOMAS Thematic Conference on Multibody Dynamics , 2023 | Lisbon, Portugal
ECCOMAS Thematic Conference on Multibody Dynamics , 2023 | Lisbon, Portugal
A selection of libraries and systems I maintain, actively develop, or have contributed to.
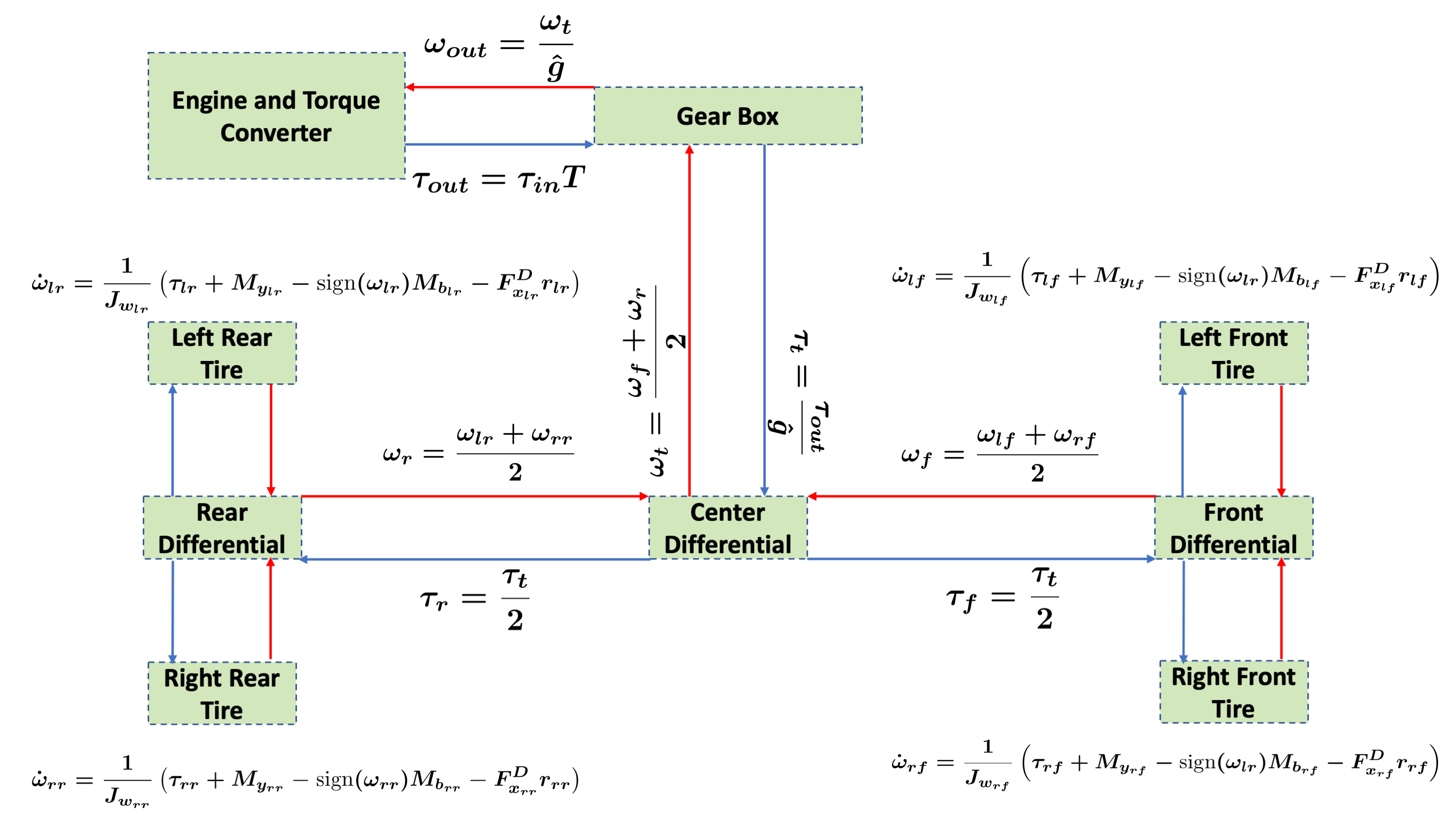
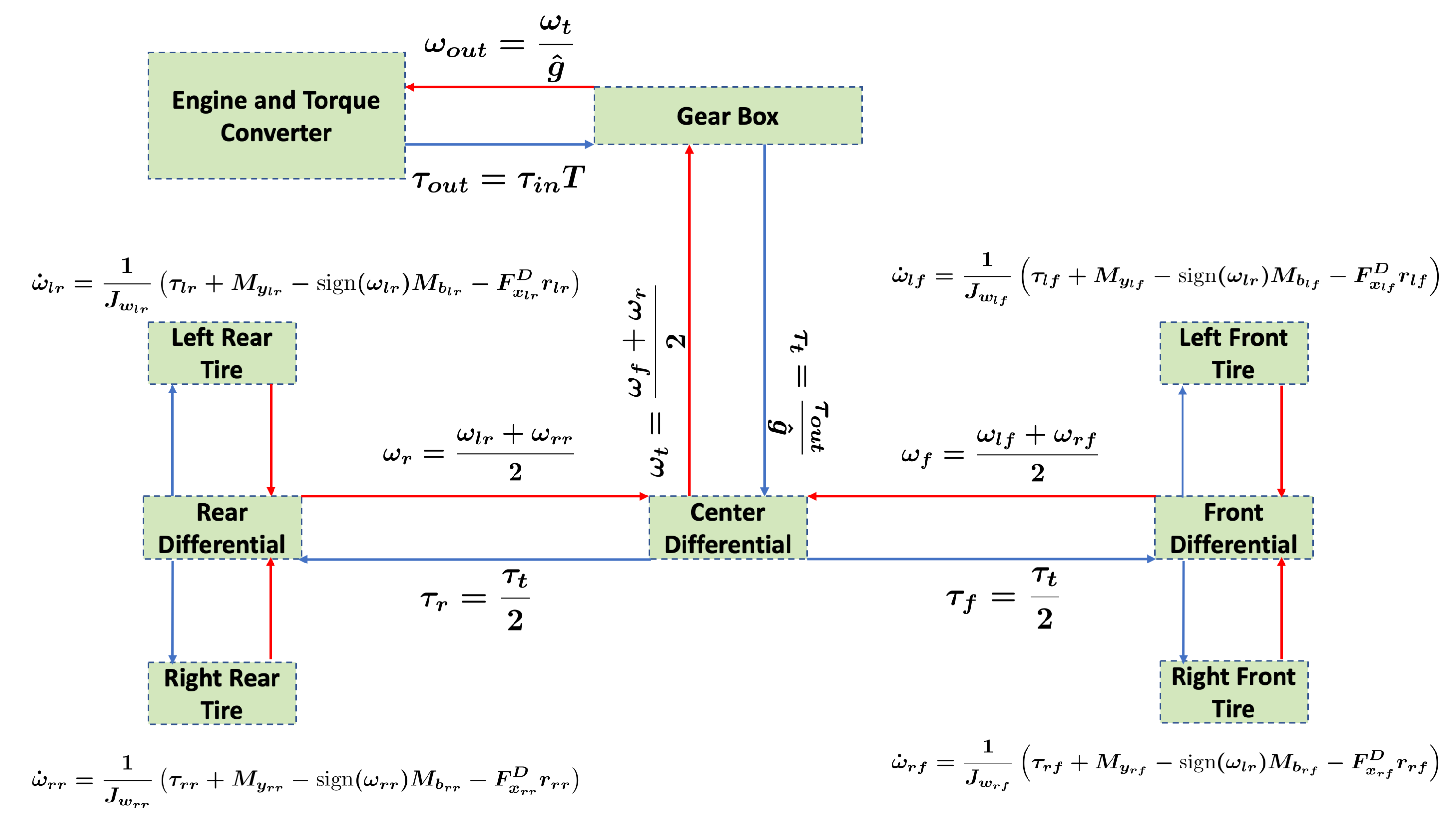
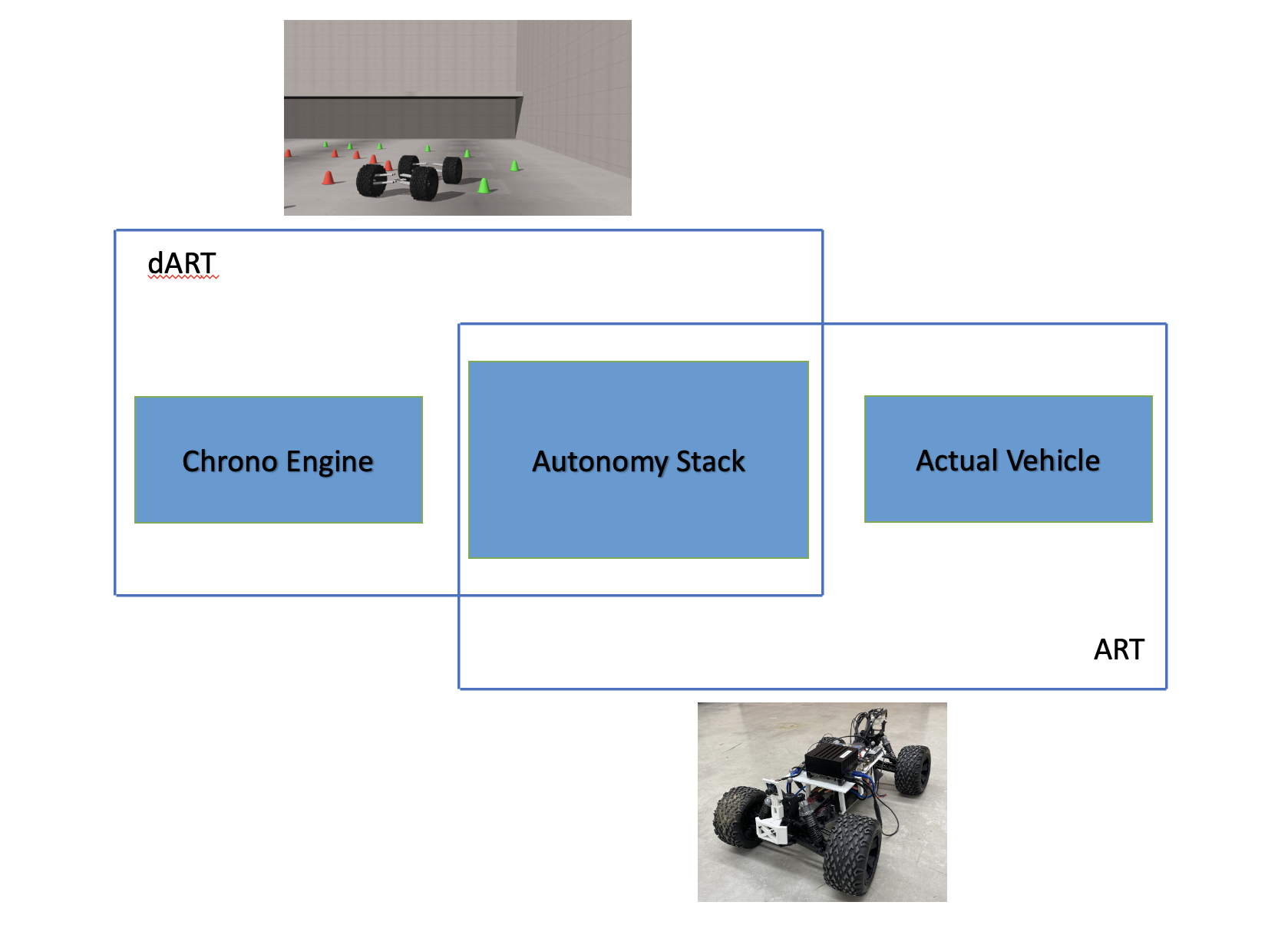
Lower Fidelity Dynamics Models for on-road wheeled vehicles written in C++ and CUDA, built for fast vehicle dynamics simulation in autonomous driving research and testing.

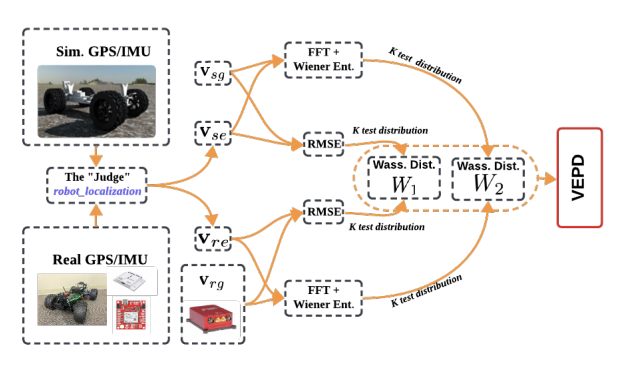
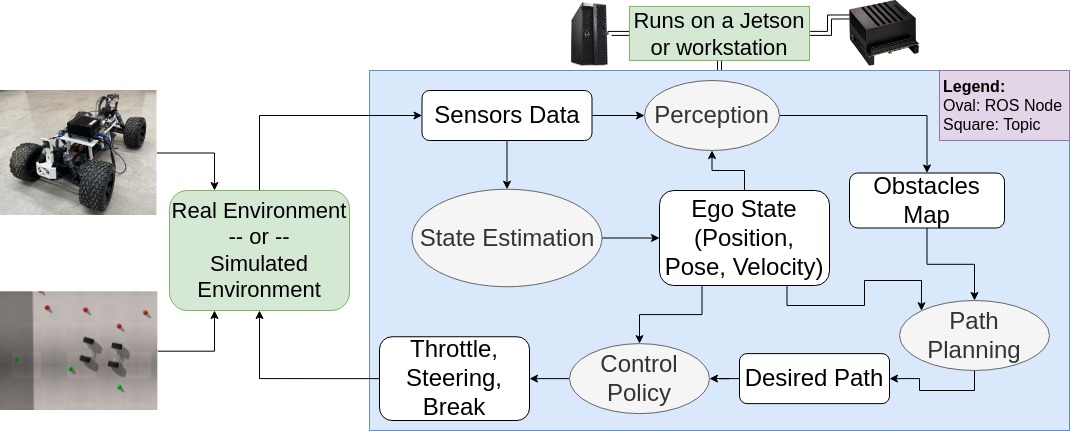
A software and hardware platform for developing and testing robot autonomy algorithms in both simulation and reality, designed to narrow the sim-to-real gap for autonomous systems.